Hephaestus and everything after
Once upon a time, someone came up with the idea that, given some intelligence, machines could possibly make humans' life easier. These machines would be called robots and, somewhat surprisingly, they were not born in the mind of Asimov, but in classic Greek culture: according to Homer's Iliad, Hephaestus used robots to assist him in building Achilles' new armor (Book XVIII). Literature has always been ahead in these areas, yet the first real known robot was built somewhere around I century. Heron's steam-powered Automatic Theater or Archytas' Dove -mentioned by Aulus Gellius, Noct. Att. L. 10- could be considered the first built robots in written history, although references to some pretty ancient mechanical orchesta lead to think, though, that the first gadgets might well have had the usual "Made in China" label.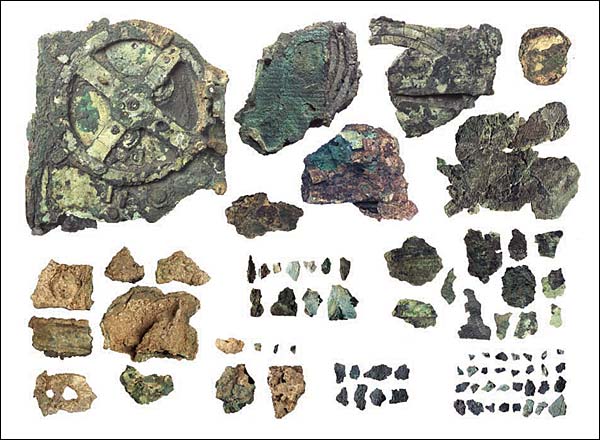
They favored common mechanisms employed in entertainment by the time, like steam engines, weights, pulls or hydraulics. The only surviving example is the Antikythera mechanism, an ancient mechanical analog computer presumedly coming from Rhodes, where they had apparently a tradition on mechanical engineering. Indeed, Pindar's seventh Olympic Ode goes like:
Adorning every public street
And seem to breathe in stone, or
move their marble feet.
Those first robots, though, were not truly such, in the sense that they blindly followed a tight sequence of actions, predetermined by their creators. In this sense, they were no more intelligent than, for example, the pencil used to write the Theory of Relativity. Rather than robots, these machines were automata. Indeed, automata did not truly show any intelligent behavior despite what it might look like to the untrained eye. In order to make decisions, they would have required some sensing and processing skills, so that they could decide the most adequate thing to do, given the circumstances. Even though the idea of what a robot should do -work we did not want to- was already there, the technical knowledge to build it was not available. On top of this, there was no real need of robot workers at the time, as human ones were fairly cheap or, unluckily for them, even came for free. Most automata were, in fact, used as moving sculptures.

Centuries would bring the basic technology required to build more complex mechanisms, plus precise knowledge on motion and articulations, particularly after Da Vinci decided to open up corpses for anatomical studies, if just to give the Inquisition some headaches. Da Vinci himself designed an automaton resembling an armored knight. Again, most devices developed through the Renaissance and up to the Industrial Revolution were automata, mostly based on pegs and levels.

The master piece of this wave would be the famous Vaucanson's Digesting Duck which was reported to move, eat and defecate through mechanical combination of more than 400 pieces. However, less mechanically complex devices, actually closer to modern robotics, had been built before. Hydraulic Al-Jazari's Peacock Fountain, built in the XII century, used a primitive sensor to trigger a small metallic figure carrying either soap or a towel when water was flushed. This might look like an exercise in mechanics not very different from cuckoos or any other mechanized clocks (Le Gardien du temps, Prague Astronomical clock, etc), but it sets the basis of modern robotics: rather than a fixed sequence of actions, a given machine may act one way or another dependind on what is happening around at the moment. In the fountain case, the system actually decided what to bring to the user -soap or towel- depending on the amount of water on the basin. However, human workers were clearly cheaper than robots yet and jobs no person could do were too complex to achieve with robots. Indeed, even though mechanics could do the trick, machine processing capabilities were still an alien concept, so technology was not really ready yet.
Clearly, the next stage for robotic development would be processing and sensing skills. The XIX century brought Babbage's computation machines. Shortly later, Jacquard's programmable looms -even though not very robot-looking to the eye- were the first reprogrammable machines, based on punched cards. The idea was, obviously, to obtain different patterns at wish without major changes in machinery and, indeed, this type of robots led the industrial application field for years and they are still under use in areas like automobile industry. At last, both technology and need where there, even though only affordable for large enterprises. It is interesting to note, though, that somewhere along the way the concept of sensors was dropped and replaced by fixed, a priori coding. Now, machines could change their behavior, but they needed someone to tell them what to do and, until new commands were available, they would do the same thing over and over. At this point, sensors came into play to give real time input to machines, so they could act one way or another without reprogramming.

Traditionally, sensors have been categorized depending on the magnitude they measure, namely thermal, electromagnetic, mechanical, chemical, optical radiation, ionising radiation, acoustic, motion, orientation and range sensors, where mechanical and range ones have been widely used in robotics. The role of sensors in modern robotics is crucial, as they allow inner programs to fork to appropriate responses depending on dynamic, real time conditions. Basically, asking a robot to operate without sensors would be like asking someone to cross a highway blindfolded and ear-plugged. It could be feasible to just measure a priori how many cars are moving across at a given time frame and how fast they move, and to ask the person to just go for the opening and expect that everything will go as expected. Indeed, industrial environments allow for this type of robots and most reviewed robots up to this point could just operate without sensors, even though some of them used primitive ones, like Heron's hydraulics. However, XX-XXIth century robots would go for sensors for flexibility and adaptability to a changing, usually unpredictable world.
 It was the first half of the XXth century that brought everything that was required for modern robotics. The word robot (robota) was first used by czeck writer Karel Capek in his RUR (Rossum's Universal Robots), applied to humanoids that did the hard work according to a program in a very golem-like way. Metropolis would introduce Maria Robota, a full metal gynoid capable of thinking on her own, and, finally, Asimov would introduce robotics as a science in his short tale: Runaroud (1941). Obviously, these robots on paper were still impossible to build at the time, but the idea of using a robotic assistant with thinking capacity was finally set upon a technological basis.
It was the first half of the XXth century that brought everything that was required for modern robotics. The word robot (robota) was first used by czeck writer Karel Capek in his RUR (Rossum's Universal Robots), applied to humanoids that did the hard work according to a program in a very golem-like way. Metropolis would introduce Maria Robota, a full metal gynoid capable of thinking on her own, and, finally, Asimov would introduce robotics as a science in his short tale: Runaroud (1941). Obviously, these robots on paper were still impossible to build at the time, but the idea of using a robotic assistant with thinking capacity was finally set upon a technological basis.By the middle of the XXth century, technology was also there and, after two world wars provoked a shortage of workers both in Europe and America, there was also a real need to build such expensive devices. Industry was the first to give a shot to robots, and the only customers who could afford one at the time. Devon and Engleberger, two north American engineers, created the Unimates, originally used to move heavy stuff around in factories. Not too surprisingly, General Motors was the first large firm to introduce robots in their factories and they have thrived in the car industry ever since.

These 50s devices fitted quite well the robot definition that the world used for more than 20 years, but, in fact, they lacked something important to fit what robots are supposed to be today: although they could change their activity in a very Jacquard's loom-like way, they did not make decisions. From this point of view, old robots were not smarter than our programmable kitchen robots, that may produce a milk shake or a quiche by simply turning a knob, but, obviously, do not decide what we will eat for lunch. In this sense, if a car factory changes a car model and is using a robot to do the painting, it can be easily reprogrammed to fit to the new height and length of the vehicle and not, for example, paint the windshield. However, some person would have to load a new set of instructions into the thing, as it would not be able to decide that, in fact, the car it is painting is not the same old one. Robots became, at this point, the swiss army-knife of industry.
1700 years might seem an awfully long time to move from automata to robots. However, if we consider that it took humans 3.9 million years to evolve from Australopitecus to Cromagnon, it is not so much. Should we consider evolution in terms of speed, in the 17 minutes it would take humanity to cover 35 km in a highway, robots would be back from a trip around the Earth.
The ability to adapt on their own to a potentially changing environment would be a key requirement for the next, big, robotic step: space, far and beyond. In this case, rather than a lack of human resources, robots were supposed to replace humans in hazardous situations. Indeed, Victor Scheinman managed to put a Vicarm robotic arm in several Viking probes to gather rocks and soils for research. In lunar missions, robotic teleoperation via a video link could do the trick to decide where and how to move. However, Mars missions would require more decision capability on the robot side, as delays in video transmission would make it unfeasible to actually tell the robot where to go before it was already gone within a deep crack or a cliff. Fortunately, AI had already been established as a science on its own right in Dartmouth and computers were starting to reach acceptable dimensions for adaptive robots to be developed. The key idea was simple: given a set of sensors, their readings could be fed to a computer so that it might choose the most suitable line of actions for the input situation. In fact, much work was being conducted in research at the time, along with industrial applications.

Sensors were, as commented, of key importance and, while the first of these robots, turtle ELSIE, could only follow a light, its descendants incorporated as many of them as possible, like cameras, infrared, sonar, contact sensors, etc. Most of these robots, though, were not supposed to do anything more complex than navigate, which, in this context, means to move towards a goal in a safe way. However, they now decided how to reach it on their own. These research robots remodeled the classic definition of robot into "a device capable of moving and making decisions on its own to achieve a certain task".
Even though technology and need were already there, robots were still far from affordable and customers where mostly government, research centers or large industrial firms. In the first case, robots typically included rescue devices, planet rovers, deep sea or volcano explorers, radiation cleaners, etc. Industrial firms were basically concerned with robotic arms and heavy equipment transportation, which in a factory environment only requires the robot to be capable of following a line on the floor. Research produced very interesting prototypes, including humanoid robots like Asimo or HOAP, flying helicopters, scuba-bots, insectoids, swarm robots, etc. However, none of these prototypes was commercialized in a massive way.



0 comments:
Post a Comment